Building a Stratum 1 NTP Server Using Raspberry Pi
-
Hi all --
This is a follow up post from a thread started here:
https://forum.netgate.com/topic/143285/sg-2340-mbt-4220-gps-lure-stratum-1-ntp-clock-under-pfsense
I'm curious if anyone out there as built a Stratrum 1 NTP server using a Raspberry Pi and GPS HAT? It sounds like a fun little weekend project. If so, what components did you use (e.g. Raspberry Pi version, GPS HAT, case, etc.)? Also, I found this guide online -- for those that have build an NTP server using a Pi -- is this what you followed?
https://www.ntpsec.org/white-papers/stratum-1-microserver-howto/
Here also is a nice comparison between using a custom built Pi solution vs. a couple off the shelf solutions:
https://coverclock.blogspot.com/2017/03/my-stratum-1-desk-clock.html
Thanks in advance for your help and insight.
-
@johnpoz specifically said in that thread that he was running exactly that configuration. Perhaps he could share the details with you.
-
Yeah I have 1 running... Be happy to share..
Let me look up what hat I specifically ordered... BRB
edit: here you go this is the one I bought
https://store.uputronics.com/index.php?route=product/product&path=60_64&product_id=81Back on 01/03/2016, here is link to guide in setting it up on a pi
https://ava.upuaut.net/?p=951Part of the reason when with this one back when I was doing the same thing - weekend fun project :) I didn't want to have to do any soldering at all, etc.. just click the parts together ;) And do some commands and bing bang zoom instant ntp server..
All total came to £61.22, with international shipping and external antenna and case..
You could prob do cheaper today... But that is what I found when was looking over 3 years ago where I didn't have to do any soldering, and they had nice easy to follow instructions as well.
pi@ntp:~ $ ntpq ntpq> pe remote refid st t when poll reach delay offset jitter ======================================================================================================= *SHM(1) .PPS. 0 l 61 64 377 0.0000 -0.5712 0.0131 xSHM(0) .GPS. 0 l 37 64 377 0.0000 -116.273 1.5973 +ntp.your.org .CDMA. 1 u 23 64 377 31.5511 11.7484 3.7774 ntpq>Thanks for bringing this up - looking up the links to what I bought and then reading comments on that guide I found this
https://github.com/SlightlyLoony/gpsctlGoing to be playing with that soon ;)
-
@johnpoz - thanks for sharing details of your setup. I came across those same sources today in my searches (both guides and retailers for parts). Interestingly enough, it doesn't seem too much cheaper today compared to when you ordered the parts three years ago.
One quick question I did have for you - what kind of case did you decide to go with? Was it clear so you could see the PPS pulse LED, or just a regular black case? Curious what your preferences were at the time. Granted in my case (no pun intended) this box will probably be stashed away with the rest of my networking gear so no benefit of seeing internals unless I was trying to debug something.
Also, what made you follow this guide
https://ava.upuaut.net/?p=951
over this guide?
https://www.ntpsec.org/white-papers/stratum-1-microserver-howto/
Was there any particular reason? Thanks again!
-
@tman222 I followed this guide which uses a odroid c2 which is similar to the pi.
https://nguvu.org/pfsense/network%20time%20protocol%20(ntp)/ntp-server/ -
-
That guide should work fine..
And I got a dog bone clear case - so yeah can see the blinking lights ;)
here took a quick pic
-
Thanks guys - I really appreciate all the additional information! This is starting to sound like a really fun (and affordable) way to tinker around with SBCs while learning a thing or two about precision timekeeping in a networking environment. :)
@q54e3w - I looked through the nguvu.org guide and I liked the Odroid hardware stack that was chosen, especially the integration of PoE and (what appears to be) native gigabit ethernet support on the SBC. I didn't realize that there were PoE HAT's available that allowed further stacking of additional HAT's -- the one I found on the Raspberry Pi site didn't have that functionality unfortunately. Now, the $64,000 question I have for you (and everyone else) is -- is there even a case available out there to protect an SBC and taller double HAT stack like that? Or would it have to be custom machined? Does anyone have any idea?
Thanks again for your help and insight, I really appreciate it!
-
@johnpoz said in Building a Stratum 1 NTP Server Using Raspberry Pi:
0.0131
That's some fine jitter!

Steve
-
@tman222 said in Building a Stratum 1 NTP Server Using Raspberry Pi:
is there even a case available out there to protect an SBC and taller double HAT stack like that?
While I have not actually looked into these particular hats your talking about, etc. The typical dogbone cases normally allow for extra spacers to allow for different hats...
Once you get your ntp up and running - let us know the particulars ;)
Maybe this summer when get some free time I will be looking into using the Galileo satellites, from what I have been reading after this thread re perked my interest is that those are disabled by default for use in the hat.. and have to use the gpsctl code that is out there to enable them, etc..
-
@johnpoz said in Building a Stratum 1 NTP Server Using Raspberry Pi:
@tman222 said in Building a Stratum 1 NTP Server Using Raspberry Pi:
is there even a case available out there to protect an SBC and taller double HAT stack like that?
While I have not actually looked into these particular hats your talking about, etc. The typical dogbone cases normally allow for extra spacers to allow for different hats...
Once you get your ntp up and running - let us know the particulars ;)
Maybe this summer when get some free time I will be looking into using the Galileo satellites, from what I have been reading after this thread re perked my interest is that those are disabled by default for use in the hat.. and have to use the gpsctl code that is out there to enable them, etc..
Thanks @johnpoz - coincidentally, the same thing dawned on me a little bit ago while looking at Odroid cases, i.e. that the dogbone cases (i.e. cases hat just have a top and bottom plate) can we made height variable using multiple standoffs / spacers. For instance, I believe this is essentially the same style of case for the Odroid - would you agree?
https://ameridroid.com/collections/cases/products/odroid-c-series-raspberry-pi-case-black?variant=12363871911970
I think a PoE powered variant will be cool - also gives some flexibility in terms of location around the house (for best satellite signal).
-
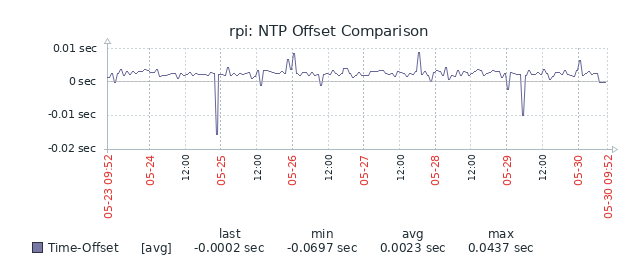
@tman222 I pimped my Pi-hole a week ago. It's on the standard Raspbian OS. Far from an expert, but it works fine I guess.
# ntpq -crv -pn associd=0 status=0415 leap_none, sync_uhf_radio, 1 event, clock_sync, version="ntpd 4.2.8p10@1.3728-o Sat Mar 10 18:03:33 UTC 2018 (1)", processor="armv7l", system="Linux/4.19.42-v7+", leap=00, stratum=1, precision=-19, rootdelay=0.000, rootdisp=1.045, refid=NMEA, reftime=e09a0a64.10b97e83 Thu, May 30 2019 9:53:08.065, clock=e09a0a67.928ebe6a Thu, May 30 2019 9:53:11.572, peer=43985, tc=4, mintc=3, offset=0.001561, frequency=-7.225, sys_jitter=0.002188, clk_jitter=0.002, clk_wander=0.001 remote refid st t when poll reach delay offset jitter ============================================================================== o127.127.20.0 .NMEA. 0 l 3 16 377 0.000 0.002 0.002I used the cheapest GPS USB stick I could get and soldered the PPS cable. (https://blog.elektrowolle.de/2017/04/27/gps-pps-basierter-ntp-server-auf-raspberry-pi/)
This is my relevant ntp.conf part, the other examples would not work.
# GPSD server 127.127.20.0 minpoll 3 maxpoll 4 prefer fudge 127.127.20.0 flag1 1 refid NMEAComparing it to 0.de.pool.ntp.org with Zabbix:

-
Thanks @athurdent for sharing your setup - that looks very cool! I find it interesting that you chose to go with a USB receiver instead of the Pi GPS HAT's that everyone else has been using. Was there any particular reason for that? Are you seeing any adverse effects from using USB (e.g. timing issues, extra jitter, etc.)? I suppose it could also be that using PPS helps offset some of that.
Looking through the link you posted - I did find this interesting part regarding reducing jitter:
http://www.satsignal.eu/ntp/Raspberry-Pi-NTP.html#nohz
https://www.kernel.org/doc/Documentation/timers/NO_HZ.txtHas anyone tried this and seen noticeable reduction in jitter?
Thanks again everyone.
-
@tman222 Thanks! :)
I went with a USB receiver, because it's just a little home project and I did not want to spend too much money on it. I wanted to show my son how to disassemble something electronic and (hopefully) not break it, also how to solder without completely melting anything.
I had a good laugh on this one, when it came to configure NTP and compare time sources:
“A man with one watch knows what time it is. A man with two watches is never sure.”While I am no expert on NTP and did not really dive into all the background info, I think this is important to note:
"/dev/ttyAMA0
The UART device on a Raspberry Pi. Has the side effect of opening /dev/pps0 for RFC2783 1PPS data." (http://www.catb.org/gpsd/gpsd.html)So, you probably don't need to specify a separate PPS source in ntp.conf because of that. At least here that did not work anyways, maybe because GPSD already uses PPS that way.
Also, on the lastest Raspbian, there is no need to compile NTP yourself, everything is build in already now. You just have to get the symlinks for GPS and PPS in place.
This took care of it here, if I documented it right:systemctl disable hciuart systemctl mask serial-getty@ttyAMA0.service vi /etc/udev/rules.d/09.pps.rules KERNEL=="pps0", OWNER="root", GROUP="tty", MODE="0660", SYMLINK+="gpspps0"I have not tried that nohz option. I think jitter is OK and does not vary too much. But then again, I am far from an expert, just the firewall guy trying to play a little with something else :)
-
I've been meaning to put a quick how-to together for a NTP server based on a pcengine apu2 which offers much better performance at a slightly higher price. You may not need the increased accuracy but its available if you want to join the ranks of time-nuts.
chronyc tracking Reference ID : 47505330 (GPS0) Stratum : 1 Ref time (UTC) : Sat Jun 01 06:56:35 2019 System time : 0.000000004 seconds fast of NTP time Last offset : +0.000000004 seconds RMS offset : 0.000000008 seconds Frequency : 4.568 ppm fast Residual freq : +0.000 ppm Skew : 0.001 ppm Root delay : 0.000000001 seconds Root dispersion : 0.000000941 seconds Update interval : 1.0 seconds Leap status : Normal -
That 4ns fast? Nice!
-
@q54e3w said in Building a Stratum 1 NTP Server Using Raspberry Pi:
I've been meaning to put a quick how-to together for a NTP server based on a pcengine apu2 which offers much better performance at a slightly higher price. You may not need the increased accuracy but its available if you want to join the ranks of time-nuts.
chronyc tracking Reference ID : 47505330 (GPS0) Stratum : 1 Ref time (UTC) : Sat Jun 01 06:56:35 2019 System time : 0.000000004 seconds fast of NTP time Last offset : +0.000000004 seconds RMS offset : 0.000000008 seconds Frequency : 4.568 ppm fast Residual freq : +0.000 ppm Skew : 0.001 ppm Root delay : 0.000000001 seconds Root dispersion : 0.000000941 seconds Update interval : 1.0 seconds Leap status : NormalHi @q54e3w - those are some very impressive figures! As someone who is a always obsessed with performance and efficiency I just may have to try this too. :) Do you mind sharing with us what parts you used for this setup? In particular, I'm quite curious what you chose for the GPS receiver module in the APU2 box. Also, what OS did you end up running on the machine to get that level of performance (accuracy)? Was it a flavor of Linux (e.g. Debian) or something more custom?
Thanks again!
-
With the Raspberry Pi 4 having just been released, do you guys think it will perform better for this purpose given the improvements to the network on the SoC?
Also, @q54e3w - when you have a moment, could you please share some additional details with us what you are using for an APU2 based setup? I'm very curious. Thanks again!
-
i will tell you in a few days, i'm waiting for the courier ...
raspberry pi 4, but gps is from adafruit.
this will be my first experiment with this toys
...
reviced it today, i just had the time to install raspbian and soldered the gps hat, now i need to find a way to have a gps fix. i don't have the time now to do any test, the only first impression is that the board become very hot, i will probably buy something to cool it down@johnpoz maybe you know, do you think it will be possible to add a display on top of the gps hat or it will not work ? RX/TX pins are for gps data and pin #4 is used for PPS on my case
-
and this is how it work here, i have some trouble because the "howto" available are a little outdated, i need to do some research
pi@raspberrypi:~ $ ntpq -crv -pn associd=0 status=0115 leap_none, sync_pps, 1 event, clock_sync, version="ntpd 4.2.8p13@1.3847-o Tue Jul 2 16:07:07 UTC 2019 (2)", processor="armv7l", system="Linux/4.19.50-v7l+", leap=00, stratum=1, precision=-20, rootdelay=0.000, rootdisp=1938.001, refid=PPS, reftime=e0c75f48.32187a6c Wed, Jul 3 2019 19:07:20.195, clock=e0c75f56.2a9026ff Wed, Jul 3 2019 19:07:34.166, peer=43403, tc=4, mintc=3, offset=-0.147120, frequency=-17.048, sys_jitter=0.036991, clk_jitter=0.118, clk_wander=0.024 remote refid st t when poll reach delay offset jitter ============================================================================== *172.16.0.100 193.204.114.232 2 u 32 32 3 0.468 0.169 0.027 +31.14.131.188 195.113.144.238 2 u 56 64 1 18.466 0.815 0.075 -213.251.52.250 193.0.0.229 2 u 55 64 1 21.270 4.187 21.794 +85.199.214.99 .GPS. 1 u 54 64 1 35.809 -0.642 0.217 -185.19.184.35 193.204.114.233 2 u 53 64 1 22.388 4.127 23.813 o127.127.22.0 .PPS. 0 l 14 16 7 0.000 -0.147 0.037 127.127.20.0 .GPS. 0 l - 64 0 0.000 0.000 0.000